.jpg.aspx?width=650&height=532)
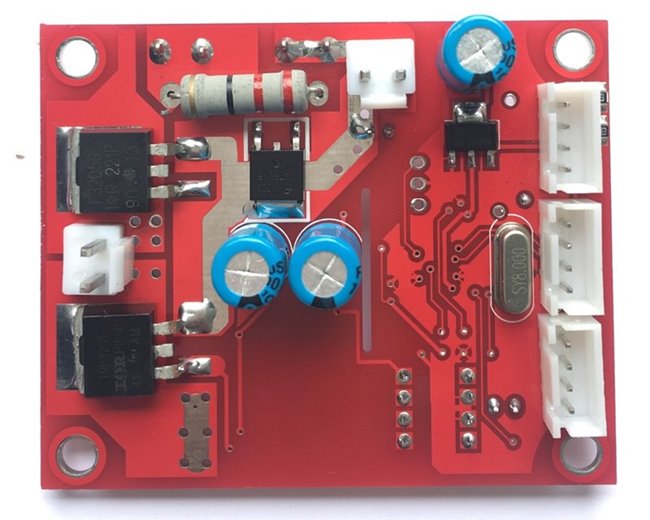
HƯỚNG DẪN SỬ DỤNG MẠCH ĐIỀU KHIỂN ĐỘNG CƠ DC TÍCH HỢP
Là một bộ cầu H được lập trình sẵn những chức năng mà trong Robot hay sử dụng.
Trước tiên để điều khiển theo cách mà mình mong muốn thì cần cấu hình lại mạch driver thông qua phần mền setup driver giao tiếp với mạch Driver bằng cổng Com. Nếu máy tính chỉ có cổng USB thì cần sử dụng mạch USB to COM PL2303 để kết nối được mạch Driver tới máy tính.
- Điều khiển động cơ bằng PWM
- Điều khiển ổn định tốc độ động cơ sử dụng PID
- Điều khiển ổn định vị trí quay của động cơ sử dụng PID
Để điều khiển được mạch có rất nhiều cách:
- PWM với tần số 8khz duty 0à250
- Cấp 1 xung cạnh lên ( ở chế độ pid vị trí)
- Cung cấp tín hiệu analog (điện áp từ 0à3,3V tương ứng với tín hiệu PWM từ 0à255)
- Điều khiển từ máy tính qua cổng com
Chức năng mô phỏng đáp ứng trên mạch Driver:
1. Các nút trên phần mềm
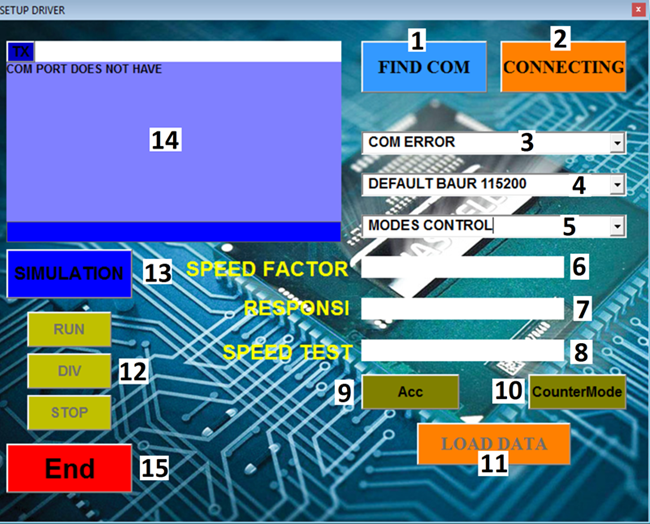
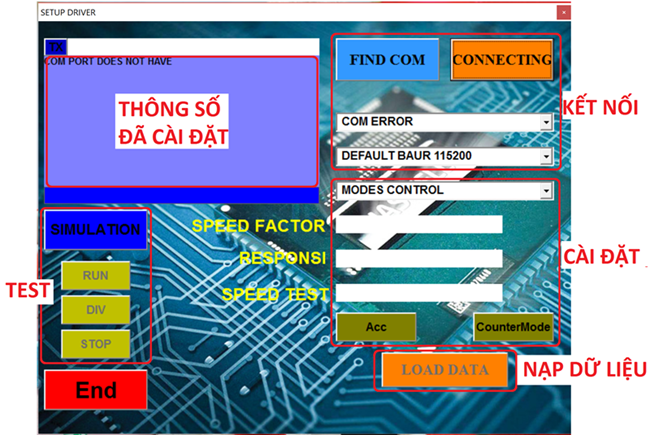
1.1 FIND COM
Truy tìm và tự động kết nối cổng Com trên máy tính
1.2 CONNECTING
Mở khóa và cho phép cấu hình lại mạch Driver
1.3 Acc
Nếu được chọn thì mạch sẽ chạy ở chế độ có gia tốc. có nghĩa nếu tốc độ hiện tại trên mạch Driver là 0 sau đó được cấp một tín hiệu điều khiển là 250(tốc độ tối đa) thì mạch sẽ tang tốc từ 0 đến 250 trong vòng 250 mily giây(ms) tức là 1ms tang 1 đơn vị.
1.4 CounterMode
Ở chế độ điều khiển bằng độ rộng xung đây là mode chọn kiểu đọc độ rộng xung ở mức thấp hay mức cao.
1.5 LOAD DATA
Nạp dữ liệu đã nhập trước đó vào mạch Driver
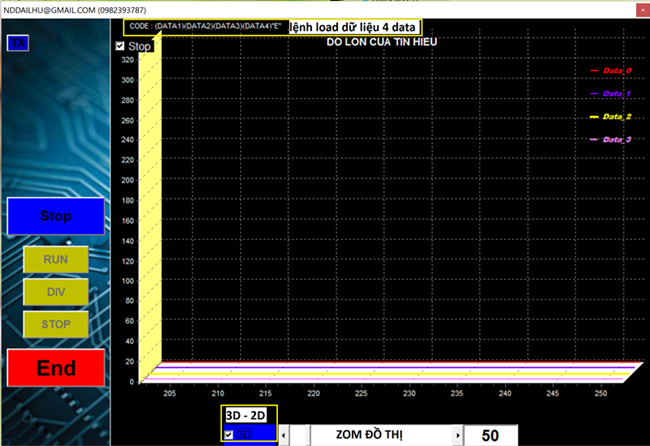
1.6 SIMULATION
Sau khi LOAD DATA thì có thể bắt đầu tiến hành kiểm tra dữ liệu đáp ứng của pid trên đồ thị
1.7 RUN
Sau khi LOAD DATA thì có thể bắt đầu tiến hành cho động cơ chạy thử với tốc độ được nạp ở dòng SPEED TEST
1.8 DIV
Sau khi RUN thì có thể bắt đầu tiến hành cho động cơ đảo chiều
1.9 STOP
Sau khi RUN thì có thể bắt đầu tiến hành cho động cơ đảo dừng lại
1.10 END
Thoát khỏi toàn bộ chương trình
1.11 TX
Truyền một dữ liệu nào đó qua cổng com đã được mở
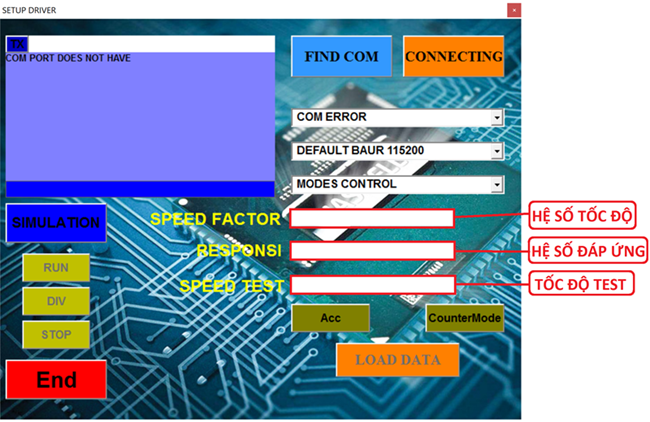
1.12 SPEED FACTOR (hệ số tốc độ)
Chỉ có tác dụng khi sử dụng các mode có chế độ PID ngoại trừ mode ANALOG PID MODE
1.13 RESPONSI
Hệ số đáp ứng thấp nhất là 1 à 1000 (càng thấp thì phản ứng của động cơ càng mạnh trước những sai lệch về vị trí và vận tốc)
Chỉ có tác dụng khi sử dụng các mode có chế độ PID
1.14 SPEED TEST
Tốc độ cho chạy thử trên máy tính(yêu cầu nguồn 24v DC được cấp độc lập với máy tính, nguồn 5v điều khiển được lấy trực tiếp từ máy tính)
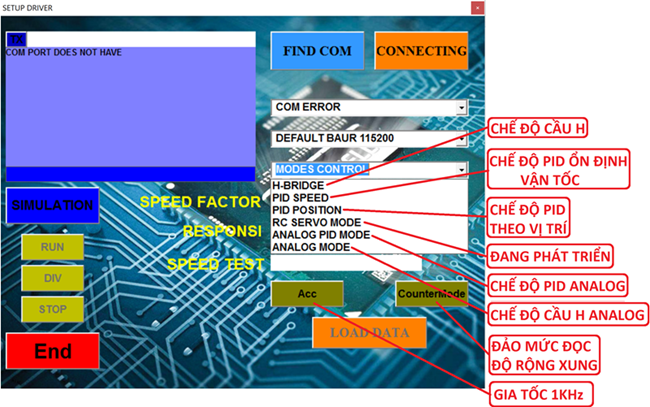
2. MODES CONTROL (các chế độ điều khiển)
2.1 H–BRIDGE (chế độ cầu H)
Điều khiển tốc độ động cơ bằng độ rộng xung PWM F=8khz à 10khz, Duty(độ rộng xung) 0 à250
Để đảo chiều quay thì ta chỉ cần thay đổi mức điện áp trên chân DIV
Yêu cầu: chỉ cần kết nối động cơ vào bus động cơ
Thứ tự setup trên phần mềm: 1à2à3à4(mặc định)à5(H–BRIDGE)à8à9,10(tùy theo cách lập trình)à11à12(nếu muốn chạy thử trên máy tính)à15
2.2 PID SPEED (chế độ điều khiển PID ổn định vận tốc)
Phương pháp điều khiển bằng độ rộng xung PWM F=8khz à 10khz, Duty(độ rộng xung) 0 à250
Để có được giải tốc độ như mong muốn ta cần chọn kỹ hệ số tốc độ (SPEED FACTOR). SPEED FACTOR trong mode này có nghĩa là số xung encoder cần phải đạt được trong 1 giây và số xung đó được tính theo công thức: SPEED FACTOR nhân với tốc độ điều khiển trên chân PWM và trừ đi 3(bởi vì Duty=4 thì động cơ mới quay).
Giải tốc độ điều khiển từ 0à255 thì trong đó có nghĩa:
+ nếu Duty=0,1 : động cơ ở trạng thái nghỉ
+ nếu Duty=2,3 : động cơ ở trạng thái giữ ở 1 vị trí
+ nếu Duy=4à250: động cơ ở trạng hoạt động ổn định vận tốc ở từng mốc Duty
Để đảo chiều quay thì ta chỉ cần thay đổi mức điện áp trên chân DIV
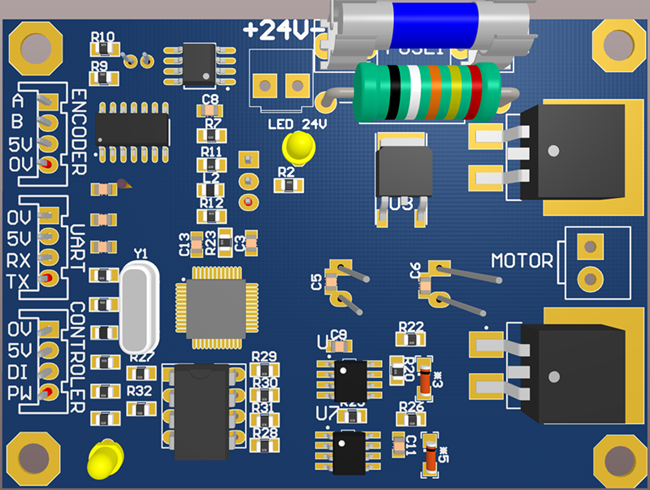
Yêu cầu: kết nối động cơ vào bus động cơ, encoder vào bus encoder(encoder nguồn 5V hai kênh A và B). Chiều động cơ và chiều quay encoder phải cùng chiều.
Để đảo chiều quay thì ta chỉ cần thay đổi mức điện áp trên chân DIV
Thứ tự setup trên phần mềm: 1à2à3à4(mặc định)à5(PID SPEED) à6à7à8à9,10(tùy theo cách lập trình)à11à12(nếu muốn chạy thử trên máy tính) à13(mô phỏng tốc độ đang hoạt động của mạch)à15
2.3 PID LOCATION (chế độ điều khiển ổn định vị trí quay của động cơ)
Phương pháp điều khiển bằng cách nhịp xung trực tiếp vào chân PWM trên bus controller. Một xung cạnh lên tương ứng: 1 Xung ngõ vào thì động cơ quay (1/4 của 1 xung encoder) * SPEED FACTOR. Giả sử encoder 100 xung/vòng, thì để quay hết một vòng ta cần nhịp 400 xung với SPEED FACTOR=1. Nếu SPEED FACTOR = 4 thì ta chỉ cần nhịp 100 xung
Để đảo chiều quay thì ta chỉ cần thay đổi mức điện áp trên chân DIV
Yêu cầu: kết nối động cơ vào bus động cơ, encoder vào bus encoder(encoder nguồn 5V hai kênh A và B). Chiều động cơ và chiều quay encoder phải cùng chiều.
Thứ tự setup trên phần mềm: 1à2à3à4(mặc định)à5(PID LOCATION) à6à7à8à11à15
2.4 RC SERVOR MODE(ổn định vị trí theo biến trở)
Điều khiển bằng độ rộng xung 0 à 250, tương ứng với góc quay biến trở 0v DC à 3,3v DC
Chân điều khiển là chân PWM, chân kết nối biến trở là chân DIV
Phương pháp điều khiển bằng độ rộng xung PWM F=8khz à 10khz, Duty(độ rộng xung) 0 à250
Thứ tự setup trên phần mềm: 1à2à3à4(mặc định)à5(RC SERVOR MODE) à6à7à8à10(tùy theo cách lập trình)à11à15
2.5 ANALOG PID MODE
Điều khiển và ổn định tốc độ động cơ bằng cách thay đổi mức điện áp 0 à 3,3V trên chân PWM
Chân DIV ở mức 1 thì động cơ được khóa(động cơ ko chạy và giữ cứng bằng điện áp ở 1 vị trí), chân DIV ở mức 0 thì cho phép động cơ hoạt động theo mức điện áp được điều khiển.
Thứ tự setup trên phần mềm: 1à2à3à4(mặc định) à5(ANALOG PID MODE) à7à11à15
2.6 ANALOG MODE
Điều khiển tốc độ động cơ bằng cách thay đổi mức điện áp 0 à 3,3V trên chân PWM
Chân DIV ở mức 1 thì động cơ không hoạt động, chân DIV ở mức 0 thì cho phép động cơ hoạt động theo mức điện áp được điều khiển.
Thứ tự setup trên phần mềm: 1à2à3à4(mặc định) à5(ANALOG PID MODE) à11à15
3. Cách khiểm tra kết nối
Để biết được mạch đã kết nối và nạp dữ liệu có thành công hay không cần quan sát ở mục 14 sẽ ghi rõ mọi trạng thái kết nối cũng như dữ liệu đã nạp được xuống mạch Driver như thế nào
Chiều encoder và chiều động cơ: trên phần mềm set Driver trên máy tính cho SPEED TEST = 2 và các thông số liên quan nạp xuống mạch bằng LOAD DATA. Sau khi nạp ta xoay thử cos động cơ nếu thấy mạch Driver giữ cos động cơ ở một vị trí thì coi như đã thành công. Còn nếu động cơ quay luôn thì chứng tỏ encoder đã ngược với jack động cơ hoặc chưa nhận được tín hiệu encoder do kết nối sai hoặc encoder bị hư.
Kiểm tra PWM bằng cách sau khi kết nối mạch Driver với mạch điều khiển ta cho Duty = 2 nếu thấy động cơ dữ ở 1 vị trí ban đầu là ok , nếu không có hiện tượng gì xảy ra thường là bị sai tần số PWM, nếu động cơ chạy với tốc độ cao là do duty sai mức điện áp(chỉnh lại chương trình PWM hoặc chỉnh CounterMode trên phần mền set Driver)